Soubor:Euclidian and non euclidian geometry.png
Skočit na navigaci
Skočit na vyhledávání

Velikost tohoto náhledu: 800 × 300 pixelů. Jiná rozlišení: 320 × 120 pixelů | 640 × 240 pixelů | 1 024 × 384 pixelů | 1 280 × 480 pixelů | 4 000 × 1 500 pixelů.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Původní soubor (4 000 × 1 500 pixelů, velikost souboru: 128 KB, MIME typ: image/png)
{kind=link}
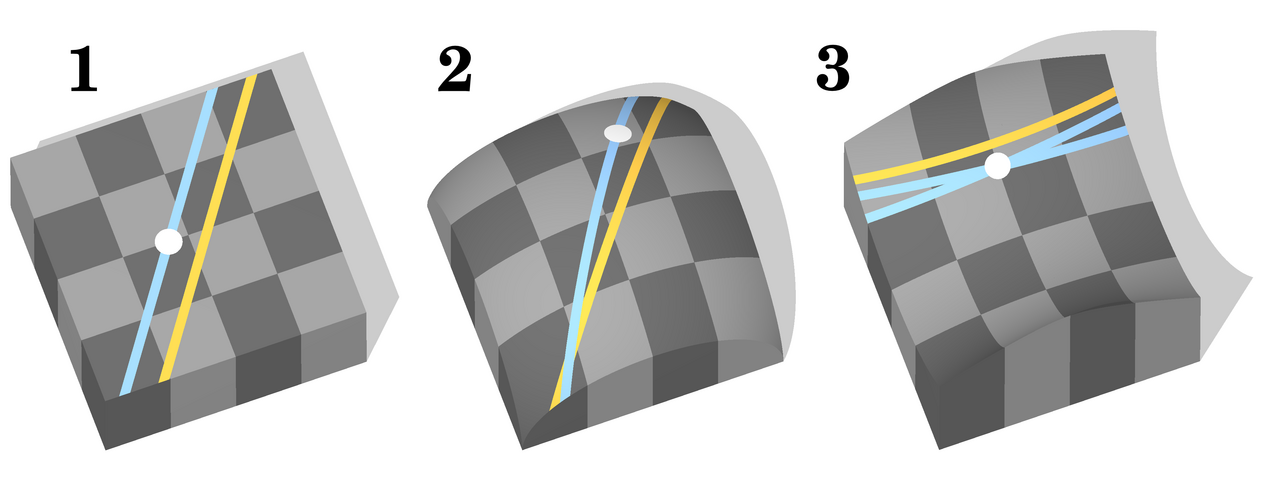
Shows three "blocks" with varying surfaces, whereon a point and som lines are "drawn" to demonstrate
- euclidian
- elliptical and
- hyperbolic geometry
To be exact, the hyperbolic surface was approximated using a chunk of the "inside" of a torus - this may not be perfectly accurate, but apparently it "looks right" in this illustration. :-)
Rendered using POV-Ray (see http://www.povray.org) and the scene description "code" below, then cropped and "numbered" using a graphics software package.
Povray source code
|
|---|
/*
====================================================================
Surfaces demonstrating euclidian, elliptical and hyperbolic geometry
--------------------------------------------------------------------
Created by Søren Peo Pedersen - see my user page at
http://da.wikipedia.org/wiki/Bruger:Peo
====================================================================
*/
// Macro for texture with background pattern, lines, and point "marker"
#macro SurfaceDrawing (
Point, // Position vector: Location of white point
RefLineMove, // Transformation: Where to place the yellow reference line
Lines // Object that renders the blue line(s)
)
#local BasePattern=pigment { // The underlying, dark grey checkerboard pattern
checker
color rgb 0.4
color rgb 0.6
scale <1,1000,1>
}
#local SP1 = pigment { // Checkerboard pattern with yellow "reference line" added
object {box {<-.07,-10,-10>,<.07,10,10> transform{RefLineMove}}
pigment {BasePattern}
pigment {color rgb <1,.8,.3>}
}
}
#local SP2 = pigment { // Checkerborad + yellow line with user-defined (blue) lines added
object {Lines
pigment {SP1}
pigment {color rgb <.6,.8,1>}
}
}
#local SP3 = pigment { // Checkerboard + lines with whit point "marker" added
object {
sphere { Point, .2 }
pigment {SP2}
pigment {color rgb 1}
}
}
pigment { // Definition of pigment, confined to a box slightly smaller than the "blocks"
boxed // to make the lines and point only appear on the top of the blocks
pigment_map {
[0.0000 BasePattern scale .5 translate <0,-1,0>]
[0.0001 BasePattern scale .5 translate <0,-1,0>]
[0.0001 SP3 scale .5 translate <0,-1,0>]
[1.0000 SP3 scale .5 translate <0,-1,0>]
}
scale <2,2,2> translate <0,2,0>
}
finish {ambient .7 diffuse .3}
#end // End of macro
plane {<0,1,0>,0 // White "tabletop" to receive shadows of the blocks (helps visualisation)
pigment {color rgb 1}
finish {ambient .8 diffuse .5}
}
box {<-2,0,-2>,<2,2,2> // Demonstrating euclidean geometry
texture {
SurfaceDrawing(<-.3,2,0>,
transform {rotate <0,35,0> translate <.3,0,0>},
box {<-.07,-10,-10>,<.07,10,10> rotate <0,35,0> translate <-.3,0,0>}
)
}
rotate <0,-20,0>
translate <-6,0,0>
}
intersection { // Demonstrating elliptical, or "Riemann", geometry
box {<-2,0,-2>,<2,5,2>}
sphere {<0,0,0>,2.8285}
texture {
SurfaceDrawing(<.65,2.45,1.25>,
transform {rotate <0,5,0> rotate <-45,35,0>},
box {<-.07,-10,-10>,<.07,10,10> rotate <0,-4,0> rotate <-45,35,0>}
)
}
rotate <0,-20,0>
translate <0,0,0>
}
intersection { // Demonstrating hyperbolic geometry
box {<-2,0,-2>,<2,4,2>}
torus {7.03,5 rotate <90,90,0> translate <0,4,0>}
texture {
SurfaceDrawing(<0,2.3,1>,
transform {rotate <0,90,0> rotate <-40,0,0> translate <0,4,0>},
merge {
box {<-.07,-10,-10>,<.07,10,10>
rotate <0,85,0> rotate <-30,0,0> translate <0,4,0>
}
box {<-.07,-10,-10>,<.07,10,10>
rotate <0,95,0> rotate <-30,0,0> translate <0,4,0>
}
}
)
}
rotate <0,-20,0>
translate <6,0,0>
}
camera { // Viewpoint
location <0,2100,-800>
look_at <.5,0,0>
angle .47
}
light_source {<-50,200,-100> color rgb 1.5} // Illumination
|
Já, držitel autorských práv k tomuto dílu, ho tímto zveřejňuji za podmínek následujících licencí:

|
Tento dokument smí být kopírován, šířen nebo upravován podle podmínek Svobodné licence GNU pro dokumenty verze 1.2 nebo libovolné vyšší verze publikované nadací Free Software Foundation. Dokument nemá neměnné části ani texty na předním či zadním přebalu. Kopie textu licence je k dispozici v oddíle nazvaném GNU Free Documentation License. |
| Tento soubor podléhá licenci Creative Commons Uveďte autora-Zachovejte licenci 3.0 Unported. | ||
| ||
| Tato licenční šablona byla k tomuto souboru přidána v rámci změny licencování. |
Můžete si zvolit libovolnou z těchto licencí.
Historie souboru
Kliknutím na datum a čas se zobrazí tehdejší verze souboru.
| Datum a čas | Náhled | Rozměry | Uživatel | Komentář | |
|---|---|---|---|---|---|
| současná | 5. 7. 2015, 22:47 | 4 000 × 1 500 (128 KB) | wikimediacommons>Cmdrjameson | Compressed with pngout. Reduced by 66kB (34% decrease). |
Využití souboru
Tento soubor používá následující stránka:
{kind=link}